HITTER
A HumanoId Table TEnnis Robot
via Hierarchical Planning and Learning
Zhi Su, Bike Zhang, Nima Rahmanian, Yuman Gao, Qiayuan Liao, Caitlin Regan, Koushil Sreenath, S. Shankar Sastry
Humanoid robots have recently achieved impressive progress in locomotion and whole-body control, yet they remain constrained in tasks that demand rapid interaction with dynamic environments through manipulation. Table tennis exemplifies such a challenge: with ball speeds exceeding 5 m/s, players must perceive, predict, and act within sub-second reaction times, requiring both agility and precision. To address this, we present a hierarchical framework for humanoid table tennis that integrates a model-based planner for ball trajectory prediction and racket target planning with a reinforcement learning–based whole-body controller. The planner determines striking position, velocity and timing, while the controller generates coordinated arm and leg motions that mimic human strikes and maintain stability and agility across consecutive rallies. Moreover, to encourage natural movements, human motion references are incorporated during training. We validate our system on a general-purpose humanoid robot, achieving up to 106 consecutive shots with a human opponent and sustained exchanges against another humanoid. These results demonstrate real-world humanoid table tennis with sub-second reactive control, marking a step toward agile and interactive humanoid behaviors.
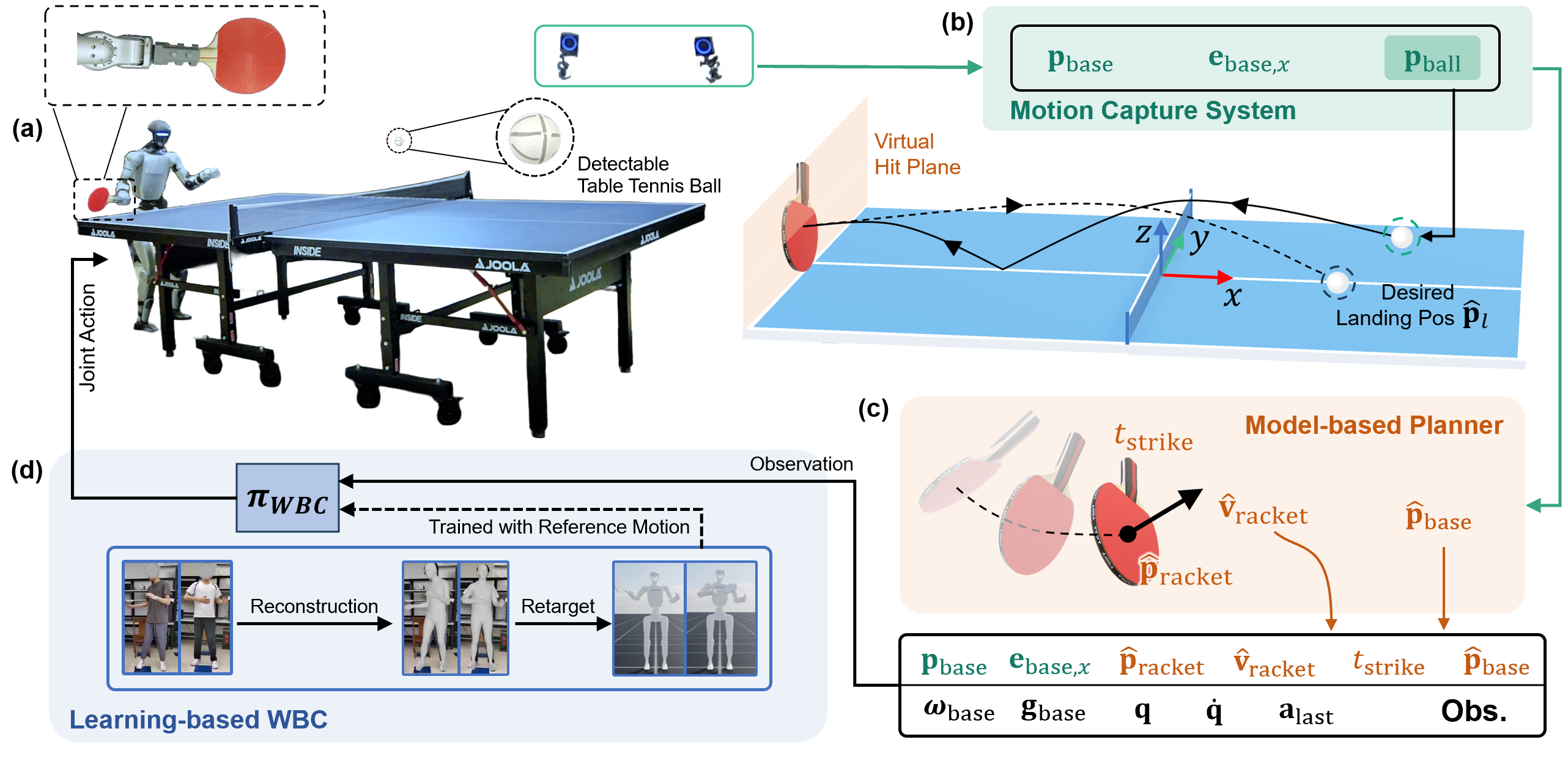
Our hierarchical framework combined a model-based planner with a learning-based controller